
ROS通讯机制实现加法运算
迪丽瓦拉
2025-05-30 02:21:57
0次
实验现象
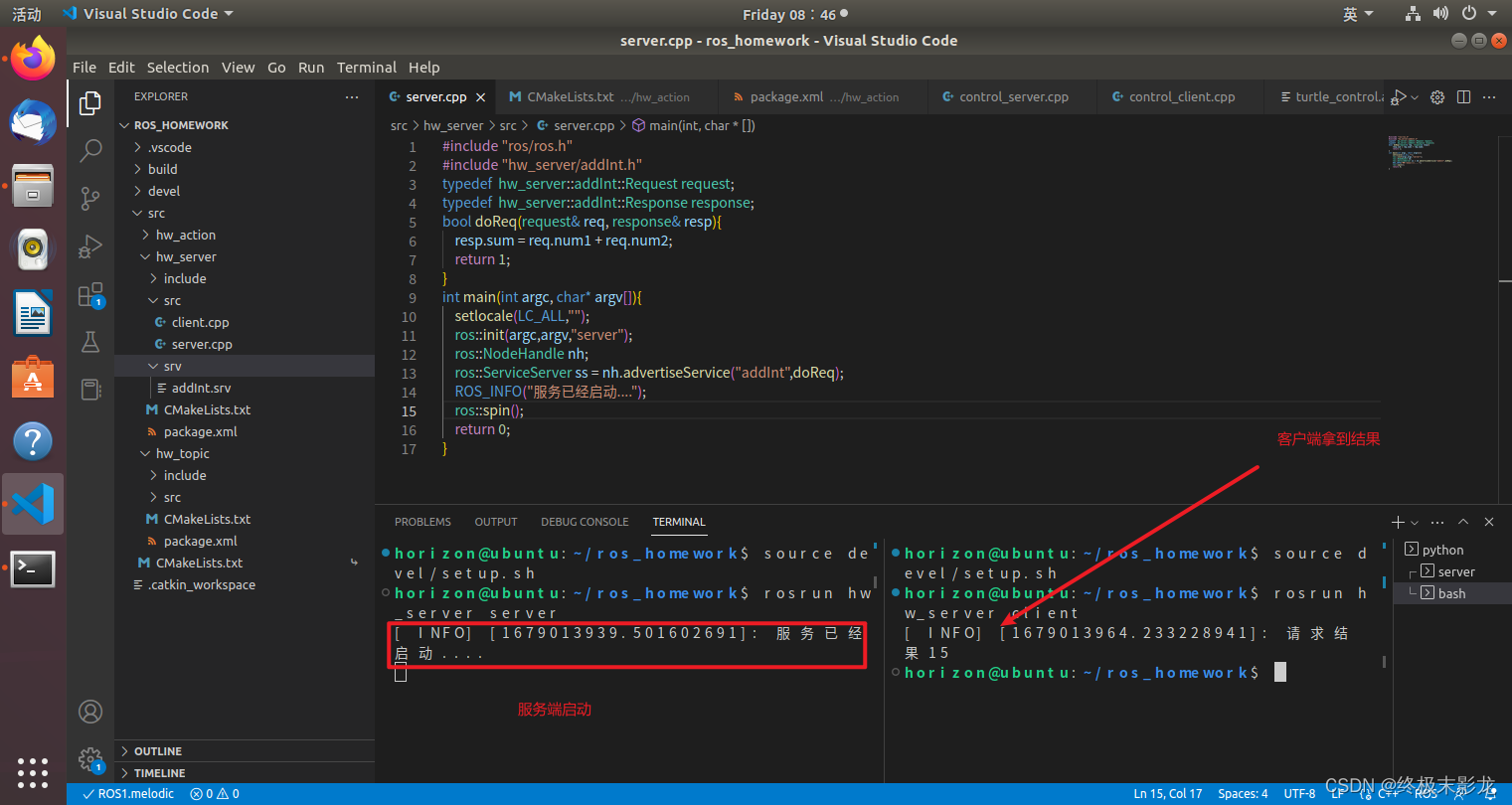
启动客户端发送两个数字,服务端接收到后将它们相加,再返回结果,客户端打印结果。
实验过程
1.创建工作空间
2.VSCODE集成ROS
笔者使用了VSCode来编写代码,VSCode集成ROS的过程我不自己写,大家可以看看这位博主的博客,写的很好:【ROS】VSCODE + ROS 配置方法(保姆级教程,总结了多篇)
3.创建软件包
在创建好工作空间之后,在src右键选择Create Catkin Package,输入包名后,导入依赖的库:
roscpp rospy std_msgs message_generation message_runtime
4.创建服务文件
在软件包中,新建srv文件夹,在里面新建文件addInt.srv,并进行编写:
int32 num1
int32 num2---
int32 sum
三横线上面是请求数据,下面是响应数据,中间用三个短横线隔开。
此时编译后,应该会在devel/include/包名下面看到生成的中间文件。
5.创建源文件
在src下创建接收方,发送方两个文件:publisher.cpp,subscriber.cpp,然后往里面编写代码。
#include "ros/ros.h"
#include "hw_server/addInt.h"
int main(int argc, char* argv[]){//防止中文乱码setlocale(LC_ALL,"");//初始化节点ros::init(argc,argv,"client");ros::NodeHandle nh;//创建客户端ros::ServiceClient sc = nh.serviceClient("addInt");//设置请求数据hw_server::addInt ai;ai.request.num1 = 5 ;ai.request.num2 = 10;//访问服务端bool res = sc.call(ai);if(res){ROS_INFO("请求结果%d",ai.response.sum);}else{ROS_INFO("请求失败!");return 1;}return 0;
}
#include "ros/ros.h"
#include "hw_server/addInt.h"
typedef hw_server::addInt::Request request;
typedef hw_server::addInt::Response response;
bool doReq(request& req, response& resp){resp.sum = req.num1 + req.num2;return 1;
}
int main(int argc, char* argv[]){setlocale(LC_ALL,"");ros::init(argc,argv,"server");ros::NodeHandle nh;//添加服务,使用回调函数处理请求。ros::ServiceServer ss = nh.advertiseService("addInt",doReq);ROS_INFO("服务已经启动....");ros::spin();return 0;
}
6.修改配置文件
add_executable(server src/server.cpp)
add_executable(client src/client.cpp)
target_link_libraries(server${catkin_LIBRARIES}
)
target_link_libraries(client${catkin_LIBRARIES}
)
include_directories(
# include${catkin_INCLUDE_DIRS}
)
generate_messages(DEPENDENCIESstd_msgs
)
add_service_files(FILESaddInt.srv
)
运行
编译后启动roscore,在工作空间下打开两个终端,分别输入以下两段:
source ./devel/setup.sh
rosrun 你的包名 server
source ./devel/setup.sh
rosrun 你的包名 client
就能够看到实现现象了。
总结
本次实验进行了ROS的服务简单通讯,让我对通讯方式有了深刻认识。而且也进一步提升了我的ROS编程水平。
参考资料
http://www.autolabor.com.cn/book/ROSTutorials
下一篇:在线考试系统设计
相关内容
热门资讯
linux入门---制作进度条
了解缓冲区 我们首先来看看下面的操作: 我们首先创建了一个文件并在这个文件里面添加了...
C++ 机房预约系统(六):学...
8、 学生模块 8.1 学生子菜单、登录和注销 实现步骤: 在Student.cpp的...
A.机器学习入门算法(三):基...
机器学习算法(三):K近邻(k-nearest neigh...
数字温湿度传感器DHT11模块...
模块实例https://blog.csdn.net/qq_38393591/article/deta...
有限元三角形单元的等效节点力
文章目录前言一、重新复习一下有限元三角形单元的理论1、三角形单元的形函数(Nÿ...
Redis 所有支持的数据结构...
Redis 是一种开源的基于键值对存储的 NoSQL 数据库,支持多种数据结构。以下是...
win下pytorch安装—c...
安装目录一、cuda安装1.1、cuda版本选择1.2、下载安装二、cudnn安装三、pytorch...
MySQL基础-多表查询
文章目录MySQL基础-多表查询一、案例及引入1、基础概念2、笛卡尔积的理解二、多表查询的分类1、等...
keil调试专题篇
调试的前提是需要连接调试器比如STLINK。 然后点击菜单或者快捷图标均可进入调试模式。 如果前面...
MATLAB | 全网最详细网...
一篇超超超长,超超超全面网络图绘制教程,本篇基本能讲清楚所有绘制要点&#...